L'avion Electrique
6 août 2009
Mise à jour du 12 septembre 2009. Premier vol du Cri-Cri électrique. Jean-Luc Soullier aux commandes
Les années que nous vivons aujourd'hui marquent l'avènement le l'avion électrique, de la voiture électrique. Allez jeter un oeil au passage sur les heur et malheurs de la voiture électrique :
le powerpoint.
Une courte parenthèse sur le vélo électrique, avec quelques données :
En Chine les vélos électriques pullulent, ne serait-ce qu'à Pékin. Ils sont d'un prix très abordable, ce qui n'est pas le cas en France :

Vélo électrique Gitane G-bike
Batterie : Panasonic Ion-Lithium
Capacité : 8 Ah 26v
Autonomie : 50 à 70 km ;
3 niveaux d'assistance
Temps de charge : 3 heures
Moteur : dans le pédalier, 180w
Cadre : ville aluminium ;
Taille unique 45 cm
Fourche : acier
Selle : Kinetic
Jantes : 26'' aluminium
Freins : V-brake AV et AR
Vitesses : Nexus 3 avec passage automatique
Pneus : 26 x 1,75
Encombrement : 175 x 65 cm
Poids : 22 kg |
En Chine un des deux éléments de la batterie du vélo est amovible. L'utilisateur a donc l'habitude de la sortir de son logement, quand il rentre du travail, et de la mettre en charge chez lui. Idem sur son lieu de travail. Ce caractère amovible de la batterie accroît l'autonomie du véhicule ( qui est de toute façon selon les modèles de 50 à 70 kilomètres ). Quand on se pose la question du véhicule électrique idéal, différents problèmes se posent. Il serait bien que l'engin soit biplace, puisse servir à faire ses courses. Ce à quoi on oublie de penser, par rapport aux petites voitures comme les Smart c'est que le véhicule électrique est totalement non polluant et peut donc pénétrer à l'intérieur de galaries marchandes, emprunter des couloirs souterrains, aller ... n'importe où. On pourrait même envisager une intégration du système dans des transports interurbains.
Cela ne poserait de plus aucun problème de le doter de deux modes de propulsion différents, une propulsion par moteur thermique constituant un système de secours. Voici ce que personnellement je préconiserais, en m'inspirant des tricycles à moteurs chinois, à voie étroite :
Le tricycle électrique biplace
Ce tricycle biplace ( inspiré de sa version chinoise ) est étroit, peu encombrant. La carrosserie ( En Chine en alliage léger et plexi ) est partiellement amovible. La batterie est plus importante pour une simple bicyclette électrique, mais elle possède un élément amovible, que l'utilisateur peut transporter n'importe où pour le mettre en charge. On peut prévoir des prises sur des bornes ou dans des parkings. |
En matière de stockage de l'énergie électrique, des progrès considérables ont été réalisés depuis les dernières décennies, au point qu'aujourd'hui toutes les perceuses électriques domestiques fonctionnent sur des accus rechargeables, ce qui aurait été impensable il y a quelques décennies. Les Chinois sont loin d'être en queue de peloton dans ce domaine.
Les capteurs solaires ont vu leur rendement progresser, dépasser 20 %
Dans le domaine de ces " ultra-ultra-léger " le nom de MacCready vient sur toutes les lèvres immédiatement.
Paul MacCready
On se demande tout de suite quel est l'engin bizarre qui se trouve derrière lui. C'est simplement la voiture électrique avec laquelle il gagna la course australienne de voitures solaires de 1987, avec un jour d'avance sur le concurrent suivant (...)
La voiture solaire de Paul MacCready, 1987, lors de la course australienne
Plus profilé, tu meurs. Traversée de l'Australie ; 3500 km avec des pointes à 113 km/h
Capotage avant enlevé

Position du pilote et capotage arrière
Comme on peut le voir, la partie supérieure arrière était entièrement constituée de cellules solaires jointives. Le véhicule repose sur un panneau plat, avec raidisseurs. La forme du véhicule lui assurait un portance, réduisant la charge sur le train
Né en 1925. Premier vol solo à seize ans. 1941 : champion des USA en vol à voile, à 23 ans. Remporte le championnat du Monde de vol à voile en France.
Sa biographie en anglais
Ci-après, il conçoit la première machine volante qui se sustente grâce à l'énergie musculaire déployée par son pilote, le Gossamer Condor.
Plan trois vues du Gossamer Condor
MacCready a choisi la formule canard, pour avoir un stabilisateur porteur. En effet la portance d'une aile se " paye " au prix d'un couple pîqueur. Voir ma BD " Si on volait ", en téléchargeable gratuit sur le site http://www.savoir-sans-frontieres.com, de même que 350 autres, en 33 langues.
Une entreprise datant de 3 années, dont aucun média n'a jamais parlé
L'aspirisouffle
Pour gagner en poids, MacCready a choisi le haubannage de l'aile, sur la quille avant, ce qui allège le longeron, qui n'a plus à encaisser que l'effort de flexion.
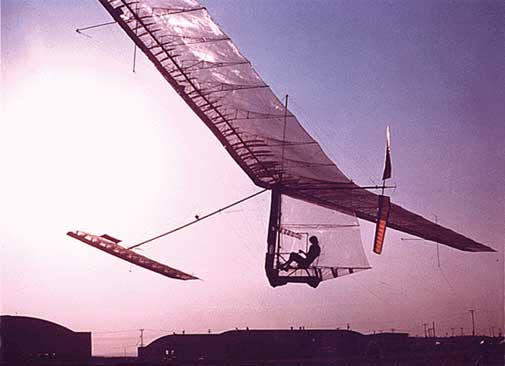
Le Glossamer Condor : premier vol humain
Aussi rapide qu'un vélo.....

Le Glossamer Albatros traversant la Manche
Tous ces vols s'effectuent " en effet de sol ". Le cycliste pilotait à l'aide d'un guidon, qui lui permettait d'abord d'avoir un appui, puis de régler la portance de l'empennage avant et enfin de se mettre en léger virage en inclinant cet empennage. L'inclinaison des ailes était assurée par le roulis induit. Il n'y avait pas d'ailerons. Mais la machine n'était pas conçue pour opérer des virages à forte inclinaison.
Vidéos des exploits des machines de Paul MacCready
Ci-après, le premier vol à l'énergie solaire, effectué par le fils de Marc Ready, 13 ans, 40 kilos, à bord du Glossamer Penguin, équipé de 3900 cellules solaires au cadmium-nickel, développant 500 watts. Poids à vide de l'appareil : 34 kilos. Un catapultage permettait à l'engin de quitter le sol.
Le premier vol avec propulsion par énergie solaire, 1974. Toujours les vélos et l'effet de sol
Le premier être humain ayant volé à l'aide de l'énergie solaire : le fils de MacCready, 13 ans

Marshall, 13 ans, au décollage
Mais la Nasa prend le relais et permet à MacCready de faire voler en 1981 le Solar Challenger. Puissance : 2,5 kW

Le Solar Challenger de Paul MacCready
Là, les choses changement complètement. On note une silhouette plus trapue, destinées à résister à l'assaut des turbulences. es turbulences.
Vu de profil. On note qu'il a des ailerons.
L'empennage de l'appareil est doté d'un profil déporteur, pour équilibrer le couple pîqueur de l'aile. Le dessus est complètement plat et porteur d'une grande quantité de panneaux solaires.
Solar Challenger, vue de dessus
C'est la partie fixe qui porte les panneaux. Le partie mobile apparaît comme une bande blanche, et en est dépourvue. Volant entre la France et l'Angleterre, sur une distance de 300 km, cet appareil a tenu l'air pendant 5 heures et 23 minutes en juillet 1981. Trois fois plus lourd que le Gossamer Penguin ( sans le pilote ), doté de 16.000 cellules solaires, alimentant deux moteurs électriques disposés en tandem, développant chacun trois chevaux, porteurs d'aimants permanents au samarium-cobalt. L'appareil bénéficie de tous les progrès réalisés en matière de nouveaux matériaux présentant un fort rapport solidité sur poids et est doté d'une hélice à pas variable.
Le saut qualitatif est considérable.
Modulo le côté hi-tech des matériaux à utiliser, on voit que le vol solaire longue durée - longue distance devient totalement réalisable, avec une machine dont les lignes restent assez proches d'un avion conventionnel, au plan par exemple de l'allongement. Mais ce n'est pas ce qui intéresse alors MacCready. Il songe alors à un appareil sans pilote, un " UAV " ( Unmanned aerial vehicle ), capable de gagner des altitudes importantes, de jour : 30 kilomètres, en redescendant quelque peu en vol plané la nuit, ou en restituant un partie de l'énergie électrique collectée, stockée dans des batteries, ce qui lui permettrait de rester en l'air indéfiniment . .
Il s'oriente alors vers le " sans queue " à fort allongement, où les rafales seront encaissées par la souplesse du longeron, autorisant un dièdre important. La stabilité de l'appareil est confiée à un ordinateur de bord qui, agissant sur un ensemble de volets disposés sur tout le bord de fuite de l'aile, d'allongement considérable, est chargé de contrôler les effets de l'aéroélasticité.
L'ensemble du projet ( pdf en anglais )
L'altitude de 30 km ( 100.000 pieds ) a effectivement pu être atteinte. Le rendement des capteurs solaires dépasse les 20 %. L'appareil peut décoller par ses propres moyens. Différentes formules ont été successivement mises en oeuvre, depuis le " tout solaire " jusqu'à des systèmes mixte où l'appareil emporte de l'énergie dans des batteries ou crée son énergie électrique à l'aide de piles à hydrogène.
Au milieu des années quatre vingt quinze la Nasa entreprend un programme ERAST ( Environmental Research Aircraft and Sensor Technology ) à partir de son centre d'essai de Dryden. Les études et recherches sont menées par la société Aero Vironment, fondée par MacCready..
Le premier appareil est le Pathfinder. 30 mètres d'envergure, six moteurs. Après avoir volé sur batterie il évolue ensuite à l'aide de capteurs solaires. Il atteint 17.000 mètres d'altitude en 1995, puis 23.000 mètres en 1997.

Le Pathfinder : 30 mètres d'envergure, huit moteurs
Une aile ne développe une portance qu'au prix d'un couple piqueur, qui doit être équilibré. Le profil des ailes de ce type de machine est évolutif. La partie centrale de l'aile est la plus " porteuse " et possède une cambrure positive. Les bouts d'aile ont un profil autostable, en S, bien visible sur ce cliché. Ces éléments d'aile créent donc une portance plus faible. C'est la solution mise en oeuvre par MacCready pour déboucher sur cette formule " sans queue " , sur une simple aile volante, de grand allongement. On a beaucoup compté, un peu trop sans doute, sur le contrôle du vol par ordinateur.
Une vue de profil du Pathfinder montrant son dièdre
La Nasa passe alors au prototype Centurion ( 1996-1998), doté de quatorze moteurs, d'une envergure de soixante dix mètres, conçu pour atteindre une altitude de 100.000 pieds ( trente kilomètres ).
Le Centurion ( 1996 - 1998 -). Soixante dix mètres d'envergure, quatorze moteurs électriques.
La photographie est prise par en dessous. Sur la partie postérieure du profil on distingue nettement, en transparence, les fines nervures. Ceci laisse à penser qu'il s'agit d'essais de qualification de la voilure, d'évaluation des qualités de vol, en l'absence des coûteux capteurs solaires. L'extrados et l'intrados ne sont recouverts que par un fin film de mylar, transparent, comme pour les appareils précédents, créés par MacCready.
Que voit-on encore ?
On distingue les quatorze moteurs électriques, en action, avec leurs hélices bipales de deux mètres de diamètres, vraisemblablement actionnées par des batteries, prévues pour des vols relativement courts. Chaque moteur développe 1,5 kW. Le quart avant de l'aile est opaque. Là doit se trouver l'élément principal de la structure, le longeron. En amont de ce longeron le prolongement des nervures, complété par un bord d'attaque léger, en polystyrène expansé ( styrofoam tapissé de mylar ), comme dans les appareils précédents.
Comme on le verra plus loin, la machine Centurion, munie de des capteurs solaires, et toujours avec ses 14 moteurs, a été convertie, par adjonction d'un élément central supplémentaire, en machine Helios HP01, dotée de capteurs solaires, allégée au maximum (1160 kilos, charge alaire 5 kilos au mètre carré ), configurée pour voir si on pouvait atteindre de très grandes altitudes grâce à une motorisation alimentée uniquement par le solaire. Essai concluant ( 30 kilomètres d'altitude ).
Comme on le verra plus loin, la version HP03 fut brisée lors de son second vol, et on verra comment. Le grossissement des débris, flottant à la surface, nous permettent d'apercevoir le longeron, le forme apparemment cylindrique et nervuré. Il semble que MacCready ait concentré dans ce longeron toute la résistance mécanique de sa machine, le reste n'étant que de l'habillage. Quand on jette un oeil à cette aile, d'une envergure hallucinante ( allongement : 30 ), dénuée de tout haubannage, on peut se demander comment celle-ci peut négocier le phénomène d'aéroélasticité. Le phénomène est relativement aisé à comprendre. A la moindre rafale, l'extrêmité d'une aile peut embarquer. L'incidence locale devient plus élevée. La portion d'aile se soulève, fléchir. Puis la réaction mécanique, élastique, de la structure, tendant à la ramener dans sa position initiale. Au résultat la machine se met à " battre des ailes " et ce moment peut s'amplifier jusqu'à rupture.
Nombre d'avionneurs ont connu ce type de déboires, sur toutes sortes de machines. Au début de l'aviation la solution passait par un haubannage, générateur de traînée. Ce n'est qu'en améliorant les qualités mécaniques de la structure interne que les avions purent être débarrassés de cette véritable toile d'araignée de câbles. Dans les machines de la Nasa : aucun haubannage. On pourrait se demander sur le longeron peut à lui seul contrarier tous les efforts liés à ce " flutter " de l'aile. Cela paraît difficile.
Il existe une autre façon de négocier le phénomène : rendre l'aile " active ", " intelligente ". Dans un graphique reproduit plus bas on voit que la machine enregistre son " pitch rate " ( son taux de variation d'incidence ) en degrés par seconde, signe que c'est une donnée essentielle pour le contrôle du vol. L'aile est truffée ( au niveau du longeron cylindrique à de capteurs détectant l'accélération angulaire, en torsion. Tout ceci est transmis à un ordinateur qui anticipe et actionne aussitôt toute une série de 72 volets qui garnissent tout le bord de fuite (longueur unitaire : un mètre ). Ceux-ci ne font pas qu'assurer le contrôle en roulis de la machine, ils contrarient toute tendance au flutter, à ce dangereux battement des ailes. En anglais flutter signifie battement ( de l'aile d'un oiseau ).
La mise en virage de l'appareil est assurée par une régulation différentielle de la puissance apportée aux moteurs ( en vol : 1,5 kW par moteur ). Point n'est donc besoin d'un empennage vertical. La mise en roulis est automatiquement due au " roulis induit " (la portion d'aile extérieure au virage va moins vite). La vitesse de la machine est de 38 pieds par seconde, soit 45 km/h.
L'aviation américaine a été confrontée à ce problème il y a des décennies, quand elle voulut mettre en service son plus gros porteur militaire ( je crois que c'était le Lookeed Galaxy ). Bien qu'ayant été calculé avec le maximum de soin, l'appareil se révéla sensible à un phénomène d'aéroélasticité, prit l'air en " battant des ailes ". Le mouvement n'était pas considérable : moins d'un mètre en bout de plume. Mais ces flexions alternées étaient rédhibitoires, entraînant une réduction drastique de la durée de vie de l'aile, à cause du phénomène de fatigue des matériaux.
Il y avait deux solutions :
- Refaire l'aile en partant de zéro ( trop coûteux )
- La doter de volets contrariant ce phénomène de flutter
La seconde solution fut adoptée. Les Américains, dès ce jour, eurent une bonne expérience de ce contrôle actif de la géométrie des voilures, à l'aide de volets, contrôlés par un ensemble " accéléromètres plus ordinateur ". Il sera évident pour le lecteur qu'un tel contrôle ne saurait être assuré manuellement. Des accéléromètres très sensibles détectent la moindre variation locale d'incidence ( ou de flexion ) et contrent aussitôt ce mouvement en actionnant des volets, comportement qu'aucun être humain ne saurait assurer aussi rapidement. En absence d'un puissant ordinateur de bord, la machine Helios ( ex-Centurion ) ne pourrait tout simplement pas voler.
Cet aspect limite singulièrement la capacité d'intervention du " pilote " d'une telle machine, qui ne peut que contrôler " si tout se passe bien ". Qu'on ne l'imagine pas tenant des commandes en continu. Tout cela fonctionne ... si tout a été prévu par le calcul, et dûment programmé. Or, dans la destruction d'Helios HP03 on verra que le développement d'une autre forme d'instabilité, en tangage, bien que prévue, avait été sous-estimée quant à ses effets et la rapidité de son développement, que le système de bord s'avéra incapable de contrer à temps. Si l'ordinateur put donner des ordres adéquats pour contrer le démarrage de l'instabilité; dans un premier temps, le second " coup de tabac " fit sortir l'engin " de son domaine de vol ", extrêmement rapidement. Mais là, j'anticipe.
Revenons à la structure cylindrique du longeron. Celui-ci est soumis à deux type d'efforts :
- En flexion
- En torsion
Dans le phénomène de flutter, d'aéoélasticité, le longeron est sollicité dans toutes les directions. La variation locale d'incidence, dans une rafale, entraîne un effort de flexion, dans le sens " haut-bas ". Mais la variation, également locale, de la traînée est génératrice d'efforts " avant-arrière ". La forme cylindrique semble alors la meilleure pour être à même d'encaisser des efforts de flexion dans toutes les directions.
Mais l'aérodynamicien sait aussi que la variation de portance entraîne une variation du couple piqueur ( voir ma bande dessinée L'Aspirisouffle ). Cette variation locale du couple va induire de dangereux efforts en torsion, d'autant plus dommageables que le longeron est extrêmement long. Il me semble que la photos où on voit ce longeron mis à nu montre des nervures circulaires, destinées à empêcher toute propagation d'un phénomène de flambage le long de ce longeron cylindrique. En ajoutant bien sûr que si l'ordinateur n'est pas là pour réagir instantanément à tout mouvement de torsion de la voilure, la rupture du longeron est garantie.
Longeron
A mon sens, seul un contrôle actif complet de la machine lui permet de voler, et même d'affronter des turbulences et des cisaillements relativement importants, lesquels se produisent ... à toutes les altitudes. Dans les basses couches, jusqu'à disons 5000 mètres, puis éventuellement dans les hautes altitudes, de manière imprévisible, même dans ces grandes allées constituées par les jet streams. Dans la photo suivante on voit qu'Helios prend son vol dans des conditions météorologiques qui sont loin d'être le calme absolu. A l'époque du crash d'Helios HP03, voir une autre photo, plus loin, on voit même la formation d'un cumulonimbus, au loin. Nous sommes de plus en juin, pas en plein hiver et le vol s'effectue dans l'hémisphère nord. Si les essais avaient été négociés en plain hiver, dans une masse d'air plus calme, ils ne seraient peut être pas terminés aussi brutalement et aussi rapidement ( au second vol ).
Mais la Nasa ne vise pas simplement un record d'alttitude, obtenu avec l'Helios HP01, mais la mise au point d'une machine tous temps, capable d'assurer un service à toute époque de l'année, sous toutes les latitudes, à des altitudes stratosphériques ( entre 15 et 30 km d'altitude ), en visant des vols non-stop.
Le prototype Centurion est alors modifié par adjonction d'un élément central, qui porte son envergure à 82 mètres, toujours avec quatorze moteurs. Il devient alors la machine Helios HPO1 destinées à vérifier la possibilité d'effectuer des vols à très haute altitude.
Helios, 14 moteurs, configuré pour les records d'altitude ( allègé au maximum )
Avec 62.000 capteurs solaires, le 13 août 2001 Hélios monte à 97.000 pieds ( 30 kilomètres d'altitude ). C'est le record absolu d'altitude pour un avion muni d'ailes. Antérieurement des altitudes supérieures avaient été atteintes par des appareils à réaction ( turboréacteurs ou moteurs fusées, comme le X-15) au cours de vols balistiques, sans que les ailes ne participent à la sustentation, dans cette phase de la mission.
A cette altitude la pression atmosphérique ne dépasse pas quelques millibars. Il y a alors deux façons d'assurer un vol soutenu :
- Soit la formule Helios, avec une faible vitesse, avec une très faible charge alaire ( par mètre carré de voilure ) : 5 kilos au mètre carré lors des vols d'Helios en haute altitude. Envergure 82 mètres. Corde de l'aile : 8 pieds ( 2,64 mètres ). Allongement : 82/2,64 = 31 ( ....). Surface voilure 216 mètres carrés. Epaisseur maximale 28 cm. Bord d'attaque en styrofoam ( expansé ), tapissé d'un film plastique mince. Poids d'Helios : 1.160 kilos, machine allégée au maximum ( poids porté à 2.320 kilos pour L'Helios HP03, du fait de l'emport d'un système de motorisation par pile à combustible représentant plus d'une tonne supplémentaire ). Vitesse nominale 38 pieds / seconde, soit 12 m/s ou 45 km/h
- Soit avoir une charge alaire élevée, mais évoluer en hypersonique ( Aurora )
En 2003 la Nasa envisage alors de viser des vols de longue durée ( une à deux semaines ) en assurant le maintien en vol nocturne à l'aide de piles à combustible, à hydrogène, à une altitude de 50.000 pieds ( 16.000 mètres ), développant 18 kilowatts. La configuration d'Helios est alors modifiée. On passe à dix moteurs. La pile à combustible est placée dans la nacelle centrale, tandis que des réservoirs additionnels sont disposés en bouts d'aile ( 7 kilos chaque ).
Helios configuré pour des vols de longue durée. Les flèches pointent vers des réservoirs en bouts d'ailes
Helios HP03 en vol. Notez les réservoirs en bouts d'ailes.
Quand l'appareil est photographié de profil, sont dièdre semble impressionnant. Mais sur le cliché ci-dessus ( où il est photographie en 3/4 arrière ), ou ci-dessous ( où il est presque de face ) on voit que ce dièdre est " très raisonnable ".

Atterrissage par vent de travers
On pourrait penser que cet allongement de 31 constitue une limite absolue. Oui et non. Helios est d'une construction trop légère pour pouvoir résister aux perturbations atmosphériques par sa propre rigidité. On a donc rendu son aile " intelligente ", en la dotant de 72 volets pilotés par ordinateur. Mais avec une charge alaire plus importante, on découvre le biplace allemand ETA ( traduction phonétique de la lettre grecque éta ) dont l'allongement atteint ... 51 !
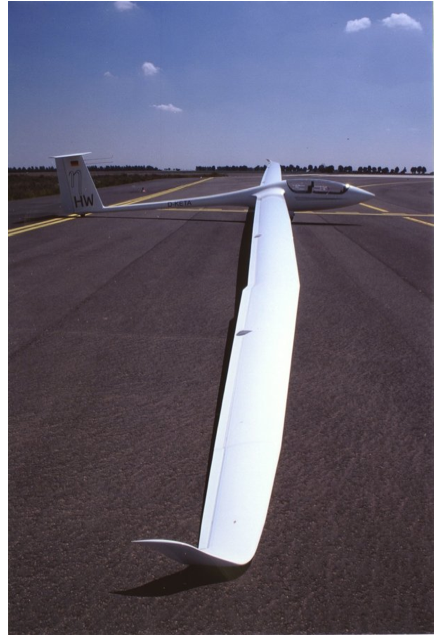
Le motoplaneur ETA vu de profil
La finesse croît avec l'allongement. Plus loin on découvrira le Stemme d'une finesse dépassant 50. Celle de l'ETA atteint 72. C'est à dire qu'en perdant 1000 mètres d'altitude il peut franchir d'un coup d'aile ... 72 kilomètres !
Le motoplaneur ETA train de moteur sorti ( Un Solo 2625 de 64 chevaux )
L'envergure atteint trente mètres. La masse à pleine charge est de 950 kilos. Vitesse maximale 270 km/h. Premiers vols en 2008. Trois ETA ont été construit. Un a été perdu aux essais, en virage. Les deux pilotes ont pu faire usage de leurs parachutes.
2 octobre 2010 : Il n'y a plus de planeurs français. La majorité des planeurs qui volent dans nos centres sont de fabrication allemande. Les motoplaneurs se développent rapidement, pour deux raisons. Ils permettent à ceux qui les possèdent se se passer des services d'un avion remorqueur. Cette motorisation à moteur dressé ( une minute de mise en oeuvre ) permettent des taux de montée de atteignant 2,5 mètres par seconde. Quand le moteur a repris sa place dans son logement, sa présence n'apporte aucun surcroît de traînée.
Mais une telle vitesse ascensionnelle ne permettrait pas à un pilote malheureux de s'extraire d'un violent rabattant, tels qu'on les rencontre parfois dans des vols en montagne et qui dépassent fréquemment les 5 mètres par seconde.
Ce moteurs procurent aux pilotes un surcroît de sécurité, de confort de vol, en leur permettent d'éviter des prises de risques excessives, de s'éloigner d'un " local terrain ". En effet, quand l'aérologie s'effondre, que les cumulus disparaîssent, on peut toujours remettre au moteur et rentrer en évitant " la vache ", quelque fois impossible en montagne.
Moins sportif mais aussi moins dangereux.
|
Helios effectuera deux vols, avant d'être détruit en vol. Le premier, le 7 juin 2003 et le second le 25 juin. Voici Helios HP03 en montée, le jour du crash :
Helios en montée, lors de son second et dernier vol, photographié depuis un hélicoptère d'escorte
Le taux de montée est de 0,5 m /s
Si on se réfère au pdf décrivant le projet on voit que la technologie du vol non stop se basait sur un principe très simple : de jour, électrolyse d'eau, emportée à bord, et stockage sous forme d'oxygène et d'hydrogène ( comprimés ). Puis la nuit, les gaz issus de l'électrolyse sont envoyés dans une pile à combustibles, l'eau produite étant stockée à nouveau. Dans cette idée, l'élément problématique est le compresseur.
Le schéma théorique du fonctionnement d'Helios
Plus simple, tu meurs
On sait que l'appareil a été détruit en vol. On pourrait s'attendre à ce que ceci soit dû à des contraintes de flexion trop élevées, encaissées par l'aile lors de la traversée de turbulences et de cisaillement. Mais quand on examine le rapport de l'accident, on voir que la cause est toute autre. Effectivement, en abordant ces turbulences, l'aile acquiert un dièdre impressionnant :

Helios, dièdre accru dans une zone turbulente, entame son mouvement d'instabilité en tangage
Ce qui va entraîner la destruction de la machine, ça n'est pas le bris de son longeron, mais son engagement dans un mouvement de tangage devenu incontrôlable. La machine est sujette au phénomène d'aéroélasticité. Quand le dièdre devient élevé, le fait d'avoir disposé des réservoirs en bouts d'aile accroît le moment d'inertie de la machine en tangage. La vitesse nominale de vol est de 38 pieds/seconde, soit environ 45 km/h. La vitesse de vol d'une " aile delta ". L'appareil n'est pas conçu pour des vitesses plus élevées. Son oscillation en tangage l'amènera à des pointes dépassant 70 km/h, selon l'enregistreur de vol. Ces vitesses induisent un effet de succion sur les éléments du bord d'attaque, en polystyrène expansé, collé, qui se détachèrent aussitôt. Il en fut de même pour l'ensemble du revêtement de l'aile, panneaux solaires compris.
Par contre le longeron, lui, tient le coup. L'aile ne s'est donc pas trouvée brisée par des turbulences, par un cisaillement des masses d'air, mais s'est trouvée simplement déshabillée par la survitesse issues de son instabilité en tangage.
Hélios, peut de temps avant que la machine ne s'abîme dans la mer

Les débris à la dérive
Le rapport de l'accident d'Helios est assez confus. Il me semble personnellement que l'ajout d'un empennage suffisamment léger pour ne pas accroître le moment d'inertie en tangage, mais d'une surface assez importante pour créer un " damping " vis à vis de cette instabilité est une solution qui aurait dû être au moins envisagée. Il est vrai que le nom de MacCready n'apparaît pas dans ce rapport. Ci-après l'accroissement du moment d'inertie en tangage de la machine en fonction du dièdre.
En dessus, la lecture du crash. En milieu de graphique un premier accroissement du dièdre, que l'ordinateur arrive à gérer. Puis dix minutes plus tard ( durée totale du vol : trente minutes ) nouvelle apparition de l'instabilité. Le dièdre dépasse 30 pieds ( dix mètres ). La machine " se met à battre des ailes" ( instabilité aéroélastique ). Oscillations rapides en tangage ( courbe du bas ) puis accroissement de la vitesse au delà de 60 pieds/seconde.
Là, les efforts aérodynamiques sur les bords d'attaque en expansé les font se détacher, idem pour la garniture de l'aile et en quelques secondes il ne reste plus que ... le longeron. Le rapport indique " que les calculs par ortdinateur n'avaient pas prévu que l'instabilité se développerait aussi rapidement et violemment.
En conclusion : les risques encourus en faisant évoluer ce type de machine ne se concentrent pas uniquement sur le risque de bris du longeron sur l'effet de rafales. L'instabilité aéroélastique peut jouer un rôle tout aussi catastrophique.
Quittant le domaine de l 'avion solaire " nous pouvons aborder celui de l'avion électrique, qui vole grâce à de l'énergie stockée dans des batteries. C'est un marché en pleine expansion. Et sur ce plan des points décisifs semblant avoir été marqués. On citera pour mémoire un premier vol d'un monoplace français en décembre 2007 :

Première mondiale en France : l'envol d'un avion électrique
le 23 décembre 2007
http://www.avem.fr/actualite-apame-les-aeronefs-a-motorisation-electrique-ont-desormais-leur-association-182.html
C'est une première mondiale, l'APAME, Association de Promotion des Aéronefs à Motorisation Electrique, a réalisé le premier vol de l'avion ELECTRA F-WMDJ, équipé d'un moteur électrique de 25 cv et de batteries Lithium-Polymère.
Ce premier envol s'est déroulé le 23 décembre dernier à partir de l'aérodrome d'Aspres sur Buëch dans les Hautes-Alpes. En vol durant 48 minutes, l'avion électrique à parcouru 50 km en circuit fermé.
Cette expérience exceptionnelle dans le secteur de l'aviation de loisir permet de proposer une alternative sans précédent aux actuels moteurs thermiques pour les aéronefs nécessitant une puissance de 15 à 50 cv.
Caractéristiques de l'appareil :
Monoplace
Envergure : 9 m
Longueur : 7 m
Masse à vide sans batteries: 134 kg
Masse maxi autorisée au décollage : 265 kg
Vitesse de croisière : 90 km/h
Finesse : 13
Construction type bois et toile
Caractéristiques du groupe motopropulseur électrique :
Moteur à courant continu type "brush" industriel de 18 kW (25 cv)
Electronique de puissance développée spécifiquement pour cette utilisation
Batteries Lithium – Polymère (masse totale : 47 kg)
Hélice à pas réglable au sol ARPLAST adaptée à cette motorisation
Tableau de bord, commande de puissance, bâti-moteur, flasque moteur, etc… développés et réalisés spécifiquement pour cet appareil
A propos de l'APAME
Association récente fondée en 2007 sous la présidence d'Anne LAVRAND, l'APAME a pour objectif de promouvoir la conception, la construction et l'utilisation d'aéronefs à motorisation électrique. Elle avait pour projet ambitieux de développer un petit avion électrique. En Août dernier, l'APAME avait déjà fait "voler en silence" un ULM (voir news précédente).
Contacter l'APAME
Tel : 04 92 57 99 40
Fax : 04 92 57 99 41
Site Internet : http://www.apame.eu
|
|
Monoplace, 25 chevaux, 48 minutes et 50 km en circuit fermé à 90 km/h
Le premier avion de tourisme tout électrique
commercialisable
est.....anglo-chinois
http://www.avem.fr/actualite-le-premier-avion-electrique-commercialise-en-2010-874.html


Le Yuneec E 430 est un biplace côte à côte, avec un aérodynamisme très étudié.
Yuneec E 430
L'aile présente un fort allongement, synonyme de réduction de traînée.

Un allongement important ( plus des winglets ) mais compatible avec un placement aisé dans un hangar
Ce qui est intéressant c'est la performance en durée de vol, à deux, avec une vitesse maximale de 90 km/h :
Deux heures
Prix annoncé : 65.000 euros, ce qui n'est pas excessif pour un biplace de tourisme. Il est fabriqué en Chine, mais ne peut être commercialisé là-bas. En effet le ciel Chinois n'est pas ouvert à l'aviation de tourisme.
Là on est largement dans la fourchette d'utilisation d'un petit avion de tourisme, pouvant servir pour l'école et pour des vols en local. Ses lignes et son fort allongement de l'appareil, à la différence du Cri Cri motorisé, donne plus à l'appareil l'allure d'un motoplaneur ( moteur à puissance réduite, ou hélice tripale carrément en drapeau ). Il décolle bien sûr par ses propres moyens.
Evaluation faite par Jean-Luc Soullier : " On est dans la classe 450 Kg poids maximal (classe ULM internationale pour les biplaces). Environ 120 kg de machine, 150 kg de passagers, 180 kg de batteries, vraisemblablement des lithium-polymère, avec une capacité d'emport de 0,2 kWh par kilo. 18 Kw de puissance moyenne suffisent moyen pour faire voler cette espèce de motoplaneur. D'où 2 heures d'autonomie. |
Il me semble qu'il y a un avenir dans le domaine du motoplaneur électrique, avec éventuellement apport d'énergie à l'aide de capteurs solaires. Au plan de la motorisation, on pense à la Rolls des motoplaneurs, une machine allemande, le Stemme S10, où l'hélice peut se retracter totalement dans un capotage avant, et se déployer sous l'effet de la force centrifuge.

Le Stemme S10, le meilleur motoplaneur du monde. Biplace côte à côte, hélice rétractable. Le moteur de 85 kw ( thermique )
est sous l'aile. On distingue l'entrée d'air, ouverte. Train rétractable électriquement. Vitesse max 270 km/h, allongement : 30.
Envergure : ... 23 mètres ! Démontable et transportable sur remorque. Finesse supérieure à ... cinquante.
Réservoir plein, la distance franchissable dépasse les ... mille kilomètre. Mais l'emporte en mini-soute reste ... symbolique ( brosse à dent et pyjama pour deux ). Ici une vidéo montrant
le Stemme S10 en vol.
Selon mon ami Jacques, qui en possède un ( j'ai également volé sur cette machine, basée à Vinon ) l'idée d'une combinaison hélice rétractable, excellentes performances comme planeur, motorisation électrique, plus capteurs solaires constituerait une formule intéressante. Comme l'ETA, le Stemme peut décoller par ses propres moyens ( mais il lui faut un terrain de bonne longueur ! Sa vitesse ascensionnelle reste faible ). Ceci permet à l'utilisateur de s'affranchir du fait de devoir recourir à un avion remorqueur.
Mon ami Jacques Legalland, puriste du vol à voile, ne se sert de son moteur que pour décoller. Mais en l'air, les zones descendantes peuvent être recontrées, et je me souviens qu'après un crochet au dessus des gorges du Verdon, nous avions dû donner un coup de moteur pour rejoindre le terrain avec une bonne marge de sécurité.
L'avantage du Stemme sur tous les autres motoplaneurs, dont l'hélice, escamotée en vol plané, est montée sur pylône, sur de son logement dorsal et se redresse ( voir la photo de l'ETA sous moteur, plus haut ), est que si le moteur tarde à redémarrer, l'hélice, qui dans le cas du Stemme ne se déploie que par la force centrifuge, s'escamote aussitôt dans on logement, en attente d'un nouveau coup de démarreur. En attendant, l'appareil conserve ses performances en finesse et en taux de chute ( vitesse verticale ). Mais dès qu'un motoplaneur dont l'hélice est sur pylône sort son propulseur, il faut que celui-ci démarre rapidement, sinon cet ensemble, générateur d'une forte traînée, dégrade ses performances, et le " remède " aggrave le " cas ".
En fait, dixit ceux qui les utilisent, rares sont les cas où un pilote de motoplaneur peut se tirer d'un très mauvais pas par une remise au moteur, s'il est happé par une forte decsendance, en mongagne. La vitesse ascensionnelle ( 2,5 m/s est trop faible ).
L'enjeu : la traversée de l'Atlantique
avec un avion électrique : David contre Goliath
Au rayon des avions électriques, personne n'ignore le projet très médiatisé et très puissamment sponsorisé de Bertrand Piccard, sous le nom de Solar Impulse. En effectuant une recherche, je suis tombé sur une vidéo qui présente deux projets singulièrement différents : celui de Piccard et celui d'un certain Jean-Luc Soullier qui, celui-là, n'est ni sponsorisé, ni médiatisé. Je suggère à mes lecteurs de commencer par jeter un oeil à ce court reportage effectué dans le cadre d'un salon, où se trouvait présentées une des réalisations de Soullier, le Cri Cri propulsé par deux moteurs électriques, et la maquette du Solar Impulse de l'équipe Piccard.
Reportage d'euronews sur l'aviation solaire au salon de la Recherche et de l'Innovation
Commençons par le projet de Piccard. Comme chacun sait, énorme budget, 65 employés payés à plein temps pendant des années, un puissant sponsoring, un battage médiatique conséquent. On trouve ce qui semble être l'image du projet initial, plus ambitieux, évoquant un tour du monde sans escales, avec un appareil alors évidemment biplace.

Le projet initial de Bertrand Piccard, biplace, abandonné
L'entreprise américaine débouchant sur des machines comme Helios a été évoquée plus haut. Dénominateur commun : vitesse lente, donc durée de vol importante ( infinie pour les successeurs d'Helios, conçus comme étant des plate-formes d'observation dans pilote, évoluant bien au dessus des altitudes correspondant aux routes aériennes commerciales, ce qui lui permet a priori de s'affranchir des perturbations météorologiques sévissant dans les plus basses couches ).
Vitesse d'Helios : 45 km/h. A l'équateur, périphérie terrestre : 40.000 km. Soit un ordre de grandeur de 1000 heures pour faire un tour de Terre à cette latitude zéro : plus d'un mois. Moins, à une latitude plus importante.
Vitesse des machines de Piccard : 70 km/h. A une latitude moyenne le tour du monde sans escale représente quand même trois semaines. Il faut donc envisager de faire vivre deux hommes pendant tout ce temps dans une cabine qui devrait être chauffée et pressurisée. Autant c'était faisable dans la capsule emportée par un ballon, dont la sustentation alliait le recours à l'hélium et un fonctionnement montgolfière, à l'aide de bouteilles de propane, autant une telle formule serait beaucoup trop lourde pour un avion solaire.
Bertrand Piccard, médecin-psychiatre et aéronaute
(Pionner des "ailes delta", champion d'Europe de voltige )
Coup d'oeil au (remarquable) exploit réalisé par le tandem Bertrand Piccard - Brian Jones, bouclant en 1999 un tour du monde en ballon ( 40.000 kilomètres parcourus en en 17 jours ).

Le Breitling Orbiter III. 18.000 mètres cubes d'hélium
La vidéo
C'est un exploit, de même que la première ascension de l'Everest, mais qui ne débouchera pas sur la mise en oeuvre d'un service régulier de ballons pour voyageurs. Le pilotage d'un ballon s'effectue en recherchant les courants aériens favorables, vis à vis de leur direction et de leur intensité. On pourrait dire que le vrai pilote du Breitling orbiter III est resté ... au sol. C'est le coordinateur du service météorologie. L'exploitation des jet streams a permis au ballon des pointes à 250 km/h en " vitesse-sol.
La structure aérologique est toujours très complexe, faite de strates où la direction du vent change. Je me souviens d'un vol en Mongolfière où, en réglant l'altitude, on pouvait alterner un vent matinal, légèrement ascendant, lié à l'échauffement du versant d'une colline exposé au soleil, dirigé en gros vers le nord, avec un vent d'altitude soufflant au sud ouest. En exploitant ces deux courants aériens et en alternant les altitudes; il avait été possible de se rapprocher d'un pré confortable.
Se rappeler que ce combiné ballon à hélium - montgolfière mesure 55 mètres de haut, et pèse au décollage 8 tonnes. Il emporte un module de vie pour deux hommes, alimenté en énergie par des batteries solaires rechargeables. Le sponsor est le fabricant de montres Breitling qui consacre à ce projet trois millions d'euros. Pour lui ceci se soldera par une fantastique opération publicitaire.
Rééditer un tour du monde " solaire " posait des problèmes de devis de poids inextricables. Piccard s'est donc rabattu sur un projet plus modeste : maintenir en l'air un avion n'utilisant que l'énergie solaire, pendant un jour et une nuit, ce qui implique de stocker dans des batteries une partie de l'énergie collectée pendant le jour, afin d'assurer le maintien en vol, de nuit. Ceci a déjà été accompli en 2005 avec un engin sans pilote, de cinq mètres d'envergure, conçu par
Alan Cocconi ( AC Propulsion )
En 2005 Alan Cocconi réussit à faire voler cette maquette de 5 mètres pendant 48 heures non stop
avec rechargement diurne d'une batterie de bord pour assurer le vol nocturne
Antérieurement Alan Cocconi s'était axé sur un record de vitesse de voiture électrique de moins de 1000 kilos
Le " White Lightning " d'Alan Cocconi. 400 km/h en 1997.
Simple parenthèse : le cap des cent kilomètres à l'heure ( qui était à l'époque la vitesse absolue atteinte par l'homme ) a été franchi en 1899 par une voiture électrique, la "Jamais contente ". Donc gain d'un facteur quatre en vitesse en un siècle.
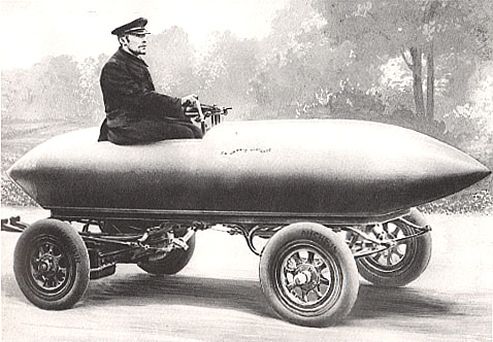
La Jamais Contente, du Belge Camille Jenatzy, 105 km/h en 1899, une tonne, 68 cv
Jenatzy, et d'autres, se battaient sur le marché des " fiacres électriques ", qui furent rapidement mis hors jeu avec l'avènement du moteur à explosion.
Revenons au projet de Piccard. Lui et sa nombreuse équipe s'orientent vers un monoplace quadrimoteur, à cabine non pressurisée, prévu pour une altitude de vol ne dépassant pas 8500 mètres. On n'assure pas la résistance de l'aile au flutter par un pilotage contrôlé par 72 volets, commandés par ordinateur, comme dans l'Helios ( allongement 32). Ici l'allongement est plus modeste, comparable à celui des planeurs 5 20 et plus ). Un fort longeron ( qui impose l'épaisseur de l'aile ) assure la rigidité.
Version monoplace du projet Piccard
Vidéo correspondante
Description du projet
Si on excepte le fantastique battage médiatique, lié au fort budget de communication, ce vol n'a rien de très extraordinaire. La percée en matière de vol solaire avait déjà été effectuée en 1981 par Paul MacCready, avec son Solar Challenger développant 2,5 kW, soit un peu plus de 3 chevaux-vapeur ( un cheval-vapeur valant 736 watts ), capable de tenir 5 heures en l'air en l'air et de couvrir des centaines de kilomètres. L'appareil anglo-chinois présenté plus haut en est le prolongement. .
Le Solar Challenger de Paul MacCready
Vu de profil
Solar Challenger, vue de dessus, au cours de sa traversée de la Manche.
L'exploit visé par Piccard, au delà de Solar Impulse est un vol de trois jours et trois nuits, à 70 km/h, toujours en monoplace, avec cabine pressurisée, représentant 5000 kilomètres, ce qui autorise un vol transocéanique. Au-delà, l'équipe de Piccard envisagera un tour du monde, parsemé de nombreuses escales, considérant qu'on peut difficilement demander à un être humain d'assurer le contrôle d'une telle machine pendant plus de 72 heures d'affilée : changement de pilote à chaque escale.
Jean-Luc Soullier s'était mis sur les rangs, avec un projet " Etincelle ", un Cri-Cri motorisé lui servant de banc d'essai.

Jean-Luc Soullier, 58 ans, assis aux commandes du Cri Cri MC15E, à moteurs électriques
L'homme est modeste, on pourrait dire effacé. Il roule dans une gimbarde hors d'âge, fuit les feux de la rampe. Je n'ai pas pu obtenir de lui une photo seyante et j'ai dû aller rechercher celle-ci en la repiquant sur la vidéo présentée plus haut, en l'aggrandissant et en la retouchant.
Pas de sponsors. Il a tout financé de ses propres deniers, à hauteur de 200.000 euros, en engloutissant année après année ses économies de pilote sur lignes commercales. Son premier travail a consisté, avec l'aide de son concepteur, a transformer le célèbre et minuscule Cri-Cri créé en 1973 par Michel Colomban, en l'équipant de moteurs électriques.

Le Cri Cri classique, équipé de deux moteurs de 15 chevaux ( 22 kilowatts )
Des centaines d'exemplaires en service dans le monde
En vol
http://video.google.fr/videosearch?q=Cri+Cri&oe=utf-8&rls=org.mozilla:fr:official&client=firefox-a&um=1&ie=UTF-8&ei=Bjx4StnMCc-i_QaWqKmKBg&sa=X&oi=video_result_group&ct=title&resnum=8#q=Cri+Cri&oe=utf-8&rls=org.mozilla:fr:official&client=firefox-a&um=1&ie=UTF-8&ei=Bjx4StnMCc-i_QaWqKmKBg&sa=X&oi=video_result_group&ct=title&resnum=8&start=20
Cinq mètres d'envergure. Vitesse de vol 220 km/h. Pèse à vide (70 kilos) : moins lourd que sa charge utile, son pilote. Colomban a créé de toutes pièces cet engin miscule, capable de faire de la voltige ( + 4,5 g, - 2,5 g ). Il a testé lui-même le longeron d'aile à la fatigue en le soumettant à cent millions de flexions alternées en le sollicitant à l'aide d'un excentrique actionné par une perceuse.
Voici l'appareil modifié par Soullier, équipé de deux moteurs électriques de 15 kilowatts chaque.

Le Cri Cri électrique, équipé de deux moteurs électriques. La partie avant a été modifiée pour loger des batteries.
Autonomie : 45 minutes, avec 45 kilos de batteries lithium-polymère
Il y a différents types de batteries au lithium. Dans celles au lithium-polymère, l'électrolyte est contenu dans un gel. Celles qui sont disponibles et qui équipent le Cri Cri électrique ont une capacité d'emport limitée, de 0,2 kWh par kilo de poids.
http://fr.wikipedia.org/wiki/Accumulateur_lithium

Chaque moteur est alimenté par son propre pack de batteries, pour accroître la sécurité. La motorisation électrique fait disparaître les traînées parasites issues du silencieux d'échappement, des fils de bougie, des cylindres, soit une réduction de traînée estimée à 45 %. Si les deux moteurs peuvent développer ensemble 30 kw, le " moineau de fer " peut voler avec 10 kW, d'où une autonomie globale de 45 minutes, en tenant compte d'une réserve de 15 minutes lors des procedures d'atterrissage. Essais en cours.
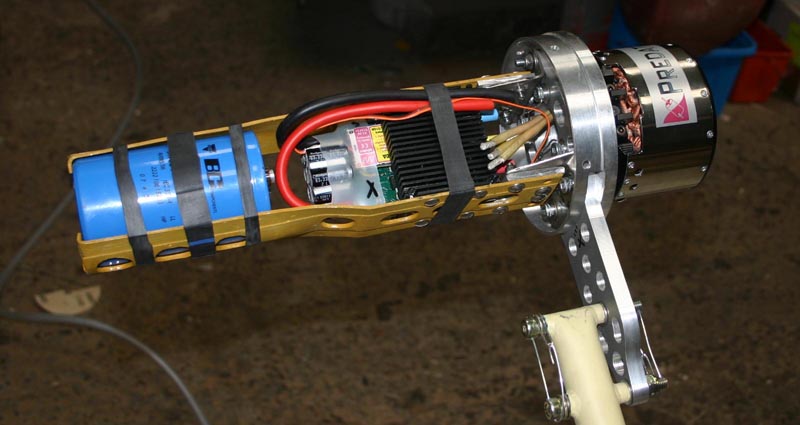
Un des deux moteurs du Cri Cri électrique, sans son capotage.
A droite, le moteur lui-même. A gauche, un condensateur. Au centre le système qui convertit le courant continu délivré par les batteries en "courant alternatif", triphasé" ( en fait sous forme d'impulsions ).
Premier vol du Cri-Cri électrique
Jean-Luc Soullier aux commandes :

Premier décollage, le 8 septembre 2009, Jean-Luc Soullier aux commandes

Ces merveilleux fous volants, dans leurs drôles de machines

En vol, photographié par Philippe Leynaud, depuis l'hélicoptère piloté par Daniel Michaud
2 octobre 2010 : Mise à jour
Sur les photos présentées ci-dessus on peut discerner un défaut de conception, qui amena Soullier à abandonner cette formule ( voir plus loin ). Le système de motorisation électrique a besoin d'être puissamment refroidi. Or dans cette formule Cri-Cri ce refroidissement est assuré par deux entrées d'air situées sur les deux capots d'hélices, à l'avant. Elle n'agit que lorsque l'appareil se déplace et interdit tout point fixe, indispensable pour tester la motorisation avant envol.

Le Cri Cri date du début des années soixante dix. Depuis, des progrès considérables ont été faits dans le domaine des matériaux, d'où un accroissement des performances aérodynamiques, une diminution de poids. La fibre de carbone remplace partout le classique alliage léger. Un appareil qui illustre ces progrès est par exemple le Quickie.
En 1977 Tom Jewett, Gene Sheehan et le célèbre Burt Rutan créent le Quickie, monoplace, 5 mètres d'envergure, 200 km/h, charge alaire 45 kilos au mètre carré. 200 kilos de poids total en charge. Distance francthissable à 175 km/h : 950 km. Construit en 3000 exemplaires.

Le Quickie

La disposition du train, non rétractable, permet une traînée minimale ( pas de jambes de train ) Effet de sol maximal à l'atterrissage.
Il existe en fait nombre d'appareils monoplaces, minuscules, utilisant des technologies avancées et offrant des performances notables.

L'Arnold AR5, 340 km/h avec seulement 65 chevaux
Un appareil français, également " tout carbone ", le LH10, biplace en tandem avec hélice quadripale propulsive et moteur à pistons, Rotax, de cent chevaux, refroidi par air, vient d'être récemment présenté. Seul le train avant est rentrant.
Le LH - 10 de LH Aviation. Un avion en kit à 100.000 euros
Distance franchissable : 1480 km. Vitesse : 340 km/h. Seul le train avant est rentrant.
Le projet Sunbird ( l'oiseau-soleil )
C'est un ... projet imaginaire, inspiré par l'appareil de 5 mètres d'envergure mis en oeuvre par Alan Cocconi, qui s'est avéré capable de voler 48 heures en 2005 en volant, de nuit, avec l'énergie emmagasinée, de jour.
En doublant son envergure et en la portant à 8-10 mètres, on pourrait concevoir un appareil du même type, capable de faire le tour de la Terre et même de ... voler indéfiniment. Mais, au lieu d'être constellé de logos de marques, de voler à coup de dollars, d'euros, de francs suisses, il serait simplement international, financé par des anonymes, et porteur des espoirs des terriens en matière d'usage de l'énergie solaire. Ce projet serait d'un coût très abordable. Personnellement j'y avais songé il y a plus de dix ans. L'appareil pourrait être suivi, guidé et et pris en charge par tous les pays traversés, en renvoyant des images du sol, avec une mini caméra orientable. Lors de ses passages en basse altitude il pourrait être repéré à l'aide de radars ( en plaçant à son bord un répondeur-radar sous la forme de trois plans métalliques orthogonaux ), éclairé et filmé. Même chose de jour, lors de ses phases de montée, ou de nuit, quand il descend. Les avions des lignes aériennes pourraient le croiser et le passagers apercevoir cet Oiseau-Soleil.
Le plus à même de mener à bien un tel projet est Alan Cocconi lui-même, de par son expérience. Peut être y a-t-il déjà songé ?
Pour terminer ce tour d'horizon, évoquons une machine extraordinaire, fonctionnant à l'énergie solaire à cent pour cent, exploitant les techniques les plus avancées de la nanotechnologie, transformant le gaz carbonique en oxygène libre et en carbone, sans la moindre pollution, avec des retombées intéressantes sur le plan de la fixation des sols, de synthèse de matériaux de construction biodégradables, de régulation du climat, de la nutrition, de la santé, du maintien de la biodiversité. Exploitant à l'extrême limite les possibilités offertes par la nanotechnologie cette machine est de plus ... auto-reproductible :
La machine en question
Retour en haut de cette page, important dossier sur l'avion électrique en général
2 octobre 2010 : Mise à jour
L'avion électrique représente pour Jean-Luc Soullier la réalisation d'un rêve vieux de vingt années. C'est loin d'être un amateur en matière d'aéronautique. Pilote professionnel, il a volé sur toutes les machines imaginables. Il a été instructeur, est actuellement pilote de ligne sur moyen courrier B757 pour transport de fret. Il a également une expérience importante en tant que pilote d'hélicoptère, d'hydravion, pilote des glaciers, et totalise 14.000 heures de vol. Il a pendant des décennies travaillé à la récupération et à la remise en état, pour des musées ou pour des clubs, ou particuliers, d'une vingtaine de machines volantes les plus diverses, allant d'antiquités élevées au rang de partie du patrimoine national, aux Mig 21 supersoniques récupérés dans l'aviation Tchèque.
Tétu comme trente six bourriques, pas découragé par les problèmes de surchauffe rencontrés avec sa première motorisation, le voilà qui passe à un monomoteur.
Non, ce n'est pas celui-là. Je me trompe d'image ...

Le nouveau bébé. On distingue les ouïes de refroidissement, de part et d'autre du capotage d'hélice. Photographié à Vinon
L'avion a été conçu par Michel Colombani, réalisé (partie cellule) par Jacques Labrousse. Adaptation moteur Lean-Luc Soullier
L'avion pèse 200 kg max MTOW (masse maximale au décollage )
C'est actuellement l'objet volant électrique piloté le plus efficace
.
Projet de première liaison postale Monaco-Nice (donc internationale )
Le tmbre qui a été émis en vue de cette opération aérophilatélique
En attentant de nombreuses compétition en 2011, premier envol à Vinon, avec une heure de vol :

Premier décollage à Vinon, après un bon point fixe.

Ces merveilleux fous volants, dans leurs drôles de machines....

Affaire à suivre
Nouveautés Guide ( Index ) Page d'Accueil